Untuk sebagian besar proyek Arduino kita yang memerlukan informasi apakah seseorang telah meninggalkan atau memasuki area, sensor PIR adalah pilihan yang sangat baik. Namun, karena mereka hanya mendeteksi gerakan dari makhluk hidup, mereka akan menghasilkan lebih sedikit alarm palsu.
Nah, di sinilah sensor microweave seperti RCWL-0516 berguna, Sensor microwave RCWL-0516 mendeteksi setiap gerakan dari objek apa pun dan tidak bergantung pada tanda panas, sehingga lebih dapat diandalkan di lingkungan panas di mana sensor PIR mungkin tidak begitu efektif
Sebelum masuk ke detail-detail teknis, mari kita pertama-tama memahami bagaimana sebenarnya cara kerja sensor RCWL-0516.
Bagaimana cara kerja radar Doppler?
Modul RCWL-0516 menggunakan "Radar Doppler", yaitu radar khusus yang memanfaatkan Efek Doppler (juga dikenal sebagai pergeseran Doppler) untuk mendeteksi gerakan dan memicu peringatan kedekatan.
i Apa itu Efek Doppler?
Efek Doppler, dinamai dari fisikawan Austria Christian Doppler yang mengusulkan istilah ini pada tahun 1842, menjelaskan perubahan frekuensi yang diamati oleh pengamat stasioner saat sumber frekuensi bergerak. Hal ini berlaku untuk semua jenis gelombang, seperti air, cahaya, radio, dan suara.
Efek ini adalah sesuatu yang mungkin sering Anda dengar, bahkan mungkin tanpa menyadarinya, seperti sirene yang nadanya turun saat ambulans lewat.

Radar Doppler bekerja dengan memantulkan sinyal microwave dari target yang diinginkan dan membaca frekuensi sinyal yang kembali. Dengan menganalisis bagaimana gerakan target telah mengubah frekuensi sinyal yang dikirim, kecepatan target dapat diukur.
Anda mungkin pernah melihat petugas polisi menggunakan alat radar kecepatan untuk menangkap orang yang berkendara terlalu cepat. Alat radar kecepatan ini, seperti jenis radar lainnya, terdiri dari pemancar dan penerima gelombang mikro. Mereka mengirimkan sinyal mikro dan kemudian menerimanya setelah memantul dari target.
Karena efek Doppler, jika objek bergerak menuju atau menjauh dari alat tersebut, frekuensi sinyal mikro yang dipantulkan berbeda dari sinyal yang dikirimkan.

Ketika sebuah mobil mendekati radar, frekuensi sinyal yang dikembalikan lebih tinggi daripada frekuensi sinyal yang dikirimkan; ketika mobil menjauh, frekuensinya lebih rendah.
.jpg)
Berdasarkan perbedaan frekuensi tersebut, radar speed gun menghitung kecepatan mobil tempat sinyal dipantulkan.
Gambaran Umum Perangkat RCWL-0516
Modul RCWL-0516 adalah sensor aktif, tidak seperti HC-SR501 Pasif Inframerah (PIR) yang bersifat pasif. Sensor ini memancarkan gelombang mikro pada frekuensi sekitar 3,18 GHz dan mengukur radiasi yang dipantulkan kembali.
RCWL-0516 sendiri cukup sederhana dan berfungsi langsung begitu diaktifkan. Cukup berikan daya antara 4V–28V dan ground. Keluaran sensor menjadi HIGH selama dua detik saat mendeteksi gerakan dan menjadi LOW saat dalam keadaan diam (tanpa gerakan terdeteksi).
Dan yang terbaik, sensor ini dapat mendeteksi gerakan hingga jarak 7 meter dengan konsumsi arus yang sangat rendah, hanya di bawah 3 mA.
RCWL-9196 IC
Inti dari sensor RCWL-0516 adalah penkontrol radar Doppler IC dengan kode RCWL-9196. IC ini sangat mirip dengan IC BISS0001 yang digunakan pada sensor PIR.
Chip ini juga mendukung pemicu berulang (repeat triggers) dan memiliki area deteksi 360 derajat tanpa titik buta. Artinya, sensor dapat mendeteksi gerakan dari segala arah tanpa ada ruang yang tidak terdeteksi.
Antena Microwave dan Penguat Daya RF
Inti dari sirkuit RF sensor ini adalah penguat daya RF MMBR941M. Komponen ini berfungsi menangkap sinyal RF berdaya rendah dan meningkatkannya ke tingkat daya yang lebih tinggi. Biasanya, penguat daya RF ini mensuplai antena sensor.

Karena antena gelombang mikro terintegrasi langsung pada PCB itu sendiri, RCWL-0516 menjadi unit yang sepenuhnya mandiri. Artinya, tidak memerlukan komponen tambahan untuk berfungsi, sehingga memudahkan pemasangan dan penggunaan.

Power
RCWL-0516 menggunakan kurang dari 3 mA arus listrik dan beroperasi antara 4 hingga 28 volt, menjadikannya komponen ideal untuk desain berdaya baterai.
Selain itu, sensor ini dilengkapi dengan regulator tegangan 3.3V yang dapat menyuplai hingga 100 mA arus listrik untuk memberdayakan rangkaian eksternal.
| Tegangan Operasi |
4-28V (umumnya 5V)
|
| Jarak deteksi | 5-7 Meter |
| Konsumsi Arus Maks | ~2,7 mA |
| Frekuensi Operasi | ~3,18 GHz |
| Daya Transmisi | 30 mW (maks) |
| Durasi Sinyal | ~2 detik |
| Output Teratur | 3,3V, 100 mA |
Komponen Opsional – LDR
Sensor RCWL-0516 memiliki fitur menarik lainnya, yaitu dukungan untuk resistor peka cahaya (LDR) opsional. LDR berfungsi sebagai sakelar otomatis yang memungkinkan sensor hanya beroperasi dalam kondisi gelap.Ini berguna untuk membangun sistem pencahayaan yang peka terhadap gerakan.

Sebenarnya, ada dua cara untuk menghubungkan sebuah LDR ke sensor.
- Dengan menggunakan dua pad CDS di bagian atas sensor.
- Dengan menggunakan pin CDS di bagian bawah dan menghubungkan LDR antara pin tersebut dan ground.
i Apa yang dimaksud dengan CDS?
CDS merupakan singkatan dari cadmium sulfida, yang merupakan komponen fotoaktif pada sebagian besar LDR (resistor tergantung cahaya). Oleh karena itu, LDR kadang-kadang disebut juga sebagai fotoresistor CDS.
Pengaturan Jumper RCWL-0516
Jika Anda melihat dengan cermat pada modul, Anda akan melihat tiga solder jumper di bagian belakang

Dengan memasang resistor dan kapasitor yang sesuai pada jumper-jumper ini, Anda dapat mengubah pengaturan default sensor
C-TM (Penyesuaian Panjang Pulsa): Dengan memasang kapasitor SMD yang sesuai pada C-TM, Anda dapat memperpanjang panjang pulsa keluaran. Panjang pulsa default adalah 2 detik. Nilai kapasitor yang lebih tinggi menghasilkan pulsa yang lebih lama. Sebagai contoh, 0,2µF memperpanjang pulsa keluaran menjadi 50 detik, sementara 1µF memperpanjangnya menjadi 250 detik.
R-GN (Penyesuaian Jarak Deteksi): Dengan memasang resistor yang sesuai pada R-GN, Anda dapat mengurangi jarak deteksi sensor. Secara default, jarak deteksi diatur pada 7m. Sebuah resistor 1M mengurangi jarak deteksi menjadi 5m, sementara resistor 270K menguranginya menjadi 1,5m.
R-CDS (Penyesuaian Sensitivitas Cahaya): Ini adalah alternatif untuk menyolder LDR. Setiap resistor dalam rentang 47K – 100K akan cukup. Semakin rendah nilainya, semakin terang cahaya yang diperlukan untuk menonaktifkan pemicu.
Pinout Sensor RCWL-0516
Sensor RCWL-0516 membawa keluar koneksi-koneksi berikut :

3V3 adalah output dari regulator 3.3V yang ada di dalam modul, bukan input pasokan daya. Jika Anda memerlukan output 3.3V yang bersih untuk memberi daya pada rangkaian logika eksternal, Anda dapat menggunakannya. Ini dapat menyediakan hingga 100mA arus.
GND adalah pin ground. Pin OUT adalah output logika TTL 3.3V. Output ini menjadi HIGH selama dua detik ketika mendeteksi gerakan dan menjadi LOW ketika dalam keadaan diam (tanpa gerakan terdeteksi).
VIN adalah pasokan daya untuk sensor. Anda dapat menghubungkan tegangan input di antara 4 hingga 28V ke pin ini, meskipun umumnya digunakan tegangan 5V.
CDS pins adalah tempat Anda dapat memasang resistor tergantung cahaya (LDR). Menambahkan komponen ini memungkinkan RCWL-0516 beroperasi hanya dalam kondisi gelap.
Eksperimen 1: Menggunakan Sensor RCWL-0516 sebagai Unit Mandiri
Salah satu alasan mengapa sensor RCWL-0516 sangat populer adalah karena merupakan sensor yang sangat serbaguna dan cukup mampu berdiri sendiri. Anda dapat meningkatkan serbaguna sensor ini lebih jauh dengan menghubungkannya ke mikrokontroler seperti Arduino.
Untuk eksperimen pertama kami, kami akan menggunakan RCWL-0516 untuk menunjukkan seberapa berguna sensor ini ketika berdiri sendiri.
Pengkabelan untuk eksperimen ini sangat sederhana. Hubungkan baterai ke VIN dan GND sensor, dan hubungkan LED merah kecil ke pin output melalui resistor pembatas arus 220Ω. Itu saja!
Sekarang, ketika RCWL-0516 mendeteksi gerakan, pin output akan menjadi "HIGH" dan menyalakan LED!'

Anda dapat menghubungkan output ini langsung ke modul relay jika Anda ingin mengaktifkan/mematikan sesuatu berdasarkan gerakan.
i Sinyal radar dapat menembus bahan non-konduktif seperti plastik. Ini berarti Anda dapat menempatkan salah satu sensor ini di dalam suatu penutup plastik jika ingin menyembunyikannya atau melindunginya dari kerusakan yang tidak disengaja.
Eksperimen 2: Menambahkan LDR
Pada eksperimen berikutnya, kita akan menggunakan LDR (atau Resistor Tergantung Cahaya).
Menghubungkan LDR sangat mudah. Anda dapat menggunakan dua pad CDS di bagian atas sensor yang dirancang khusus untuk melekatkan LDR, atau menggunakan pin CDS di bagian bawah dan menghubungkan LDR antara pin tersebut dan ground.
Anda dapat menggunakan LDR apa pun yang dapat Anda dapatkan. Selain itu, LDR tidak memiliki polaritas, sehingga Anda dapat menghubungkannya dalam arah apa pun yang Anda inginkan.

Ketika LDR terpapar cahaya, Anda akan melihat bahwa sensor tidak menghasilkan output. Namun, begitu ruangan menjadi gelap, sensor ini kembali beroperasi normal.
Ini memiliki beberapa penggunaan di dunia nyata, seperti mengendalikan pencahayaan ruangan atau mendeteksi intruder pada malam hari.
Eksperimen 3: Membaca RCWL-0516 dengan Arduino
Pada eksperimen berikutnya, kita akan menggunakan Arduino untuk terus-menerus memeriksa pin sensor untuk melihat apakah ada deteksi gerakan.
Proyek ini tentu saja dapat diperluas untuk merespons gerakan dengan berbagai cara, seperti menghidupkan dan mematikan lampu, mengaktifkan kipas atau properti Halloween, atau bahkan mengambil gambar seorang intruder.
Penyambungan/Pengkabelan
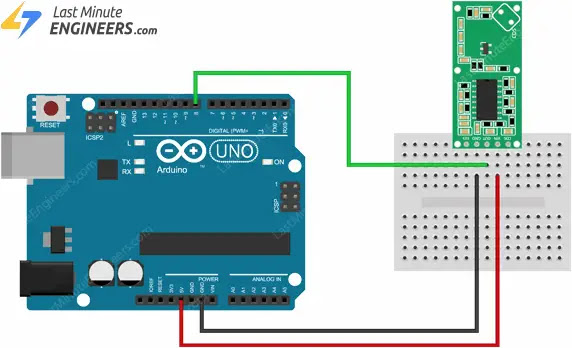
Menghubungkan sensor RCWL-0516 ke Arduino sangatlah mudah. Beri daya pada RCWL-0516 dengan 5V dan hubungkan ground ke ground. Karena RCWL-0516 berfungsi sebagai output digital, yang perlu Anda lakukan hanyalah mendengarkan pin output. Jadi hubungkan output ke pin digital #8 pada Arduino
Sekarang Anda siap untuk mengunggah beberapa kode dan membuat RCWL-0516 berfungsi.
Kode Arduino
Kodenya sangat sederhana. Pada dasarnya, itu hanya melacak apakah input ke pin #8 berada pada keadaan HIGH atau LOW.
int ledPin = 13; // choose the pin for the LED
int inputPin = 8; // choose the input pin (for Radar sensor)
int motionState = LOW; // we start, assuming no motion detected
int val = 0; // variable for reading the pin status
void setup() {
pinMode(ledPin, OUTPUT); // declare LED as output
pinMode(inputPin, INPUT); // declare sensor as input
Serial.begin(9600);
}
void loop() {
val = digitalRead(inputPin); // read input value
if (val == HIGH) { // check if the input is HIGH
digitalWrite(ledPin, HIGH); // turn LED ON
if (motionState == LOW) {
Serial.println("Motion detected!"); // print on output change
motionState = HIGH;
}
}
else {
digitalWrite(ledPin, LOW); // turn LED OFF
if (motionState == HIGH) {
Serial.println("Motion ended!"); // print on output change
motionState = LOW;
}
}
}
Dengan sensor menghadap ke atas, gesekkan tangan Anda di atas sensor. Anda seharusnya melihat pesan "Deteksi Gerakan" tercetak di terminal serial

"How RCWL-0516 Microwave Radar Motion Sensor Works & Interface It With Arduino", Last Minute Engineer, https://lastminuteengineers.com/rcwl0516-microwave-radar-motion-sensor-arduino-tutorial/

.webp)
.webp)
.webp)